
[কোর্সের মূল পাতা | নিবন্ধনের লিংক]
রোবটিক্স
(ভিডিও তে দেখানো ফাইলটা ডাউনলোড করা যাবে এখানে, https://www.dropbox.com/s/yziv9kplrjvip2k/Robot_intro2.pdf)
রোবোট (Robot) শব্দটার উৎপত্তি “Robota” মতান্তরে “roboti”[১] শব্দ থেকে। শব্দটার প্রবক্তা ছিলেন ক্যারেল ক্যাপেক, যিনি বিংশ শতাব্দীর শুরুর দিকে সাইন্স ফিকশন লেখার জন্য বিখ্যাত ছিলেন। ‘Robota’ শব্দটার মানে হল দাস (slave) বা কর্মী (worker)।
বর্তমানে Robot শব্দটি মোটামুটি একই অর্থ বহন করে। খুব সাধারন ভাবে বললে যে যন্ত্র/স্ট্রাকচার কোন নির্দিষ্ট টাস্ক (কাজ) করতে সক্ষম তাকে রোবোট বলে। “টাস্ক”টা মানুষের মত হাটাহাটি বা সামগ্রিক মানুষের আদলে কাজকর্ম (আসিমো, ASIMO- Advanced Step in Innovative Mobility[২], HuBo[৩]) ছাড়াও খুব সামান্য কিছু ও হতে পারে। যেমন একটা অটোম্যাটিক ডোর, যা মানুষ বা কিছু সেন্স করে নিজে নিজে ওপেন হতে পারে, তাকেও রোবোট বলা হলে খুব ভুল বলা হবেনা, তবে এগুলো কে সাধারনত রোবোট না বলে “intelligent system” বলা হয়। কিন্তু কোন স্ট্রাকচারের মোবিলিটি (mobility)/ মোশন (Motion) , সেন্সিং (sensing ability) আর ইন্টেলিজেন্স (inteligence) থাকলে তাকে রোবোট বলা যায়। একটা খুবই সাধারন চার চাকার গাড়ি, যদি চালক ছাড়া চলতে পারে (নিজেই প্রতিবন্ধকতা এড়িয়ে (able to avoid obstacle )), সেও রোবোট (বড় পরিসরে এগুলোকে বলে Unmanned (air/ground)vehicle-> UGV,UAV )। রোবোট হতে পারে পুরোপুরি অটোনোমাস (স্বয়ংক্রিয়), সেমি-অটোনোমাস(আধা-স্বয়ংক্রিয়), রি-প্রোগ্রামেবল অথবা হিউম্যান কন্ট্রলড।
সরাসরি সংগা দিতে গেলে এরকম দাঁড়ায়, যে ইলেট্রো-মেকানিক্যাল স্ট্রাকচার কোন কাজ করতে সক্ষম, সেই রোবোট। ইন্টিলিজেন্ট রোবোটে বিভিন্ন সেন্সর থাকে। বুদ্ধীমত্তার জন্য এর থাকে একটি সি পি ইউ (CPU)। আর থাকে একচুয়েটর (actuator)। ফিল্ড রোবোটে একচুয়েটর হল মোটর। চাহিদা ও কাজের ধরন অনুযায়ী সেন্সর নির্দিষ্ট করা হয়। সে অনুযায়ী প্রোগ্রাম লেখা হয়, সার্কিট ডিজাইন করা হয়। মটরের টর্ক থেকে শুরু করে সমস্ত কিছু তৈরির আগে সিমুলেশন করে ঠিক করা হয় এবং ডিজাইন অনুযায়ী বানানো হয়।
রোবোটিক্স মূলত রোবোট কন্ট্রোল ও ডিজাইন নিয়ে কাজ করে। এটাকে ইলেক্ট্রিক্যাল, মেকানিক্যাল, কম্পিউটার, মেকাট্রনিক্স এর সংমিশ্রন বলা যায়। তবে শুরুর জিনিষ গুলো বুঝতে খুব সাধারন আগ্রহ থাকাই যথেষ্ট।

চিত্রঃ হোন্ডার তৈরি আ্যসিমো ও একটি রোবোটিক আর্ম
আ্যসিমো সম্পর্কে আরো জানা যাবে এখানে http://asimo.honda.com/downloads/pdf/honda-asimo-robot-fact-sheet.pdf
কী নিয়ে গবেষনা হচ্ছে?
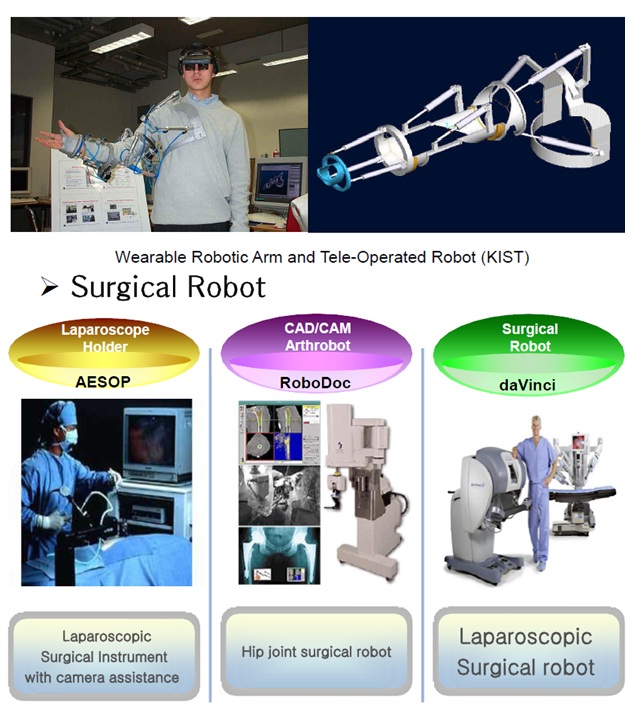
রোবোটিক্স এ রিসার্চ ট্রেন্ড গুলো একেক ফিল্ডে একেক রকম। যেমন মোবাইল রোবোটে পাথ প্ল্যানিং এ বেশি কাজ হচ্ছে, ইন্ড্রাস্ট্রিয়াল রোবোটে মূল ফোকাস efficiency বাড়ানোর এবং খরচ কমানোর দিকে, তাই কন্ট্রোল/ট্র্যাকিং এ বেশি কাজ হচ্ছে । স্পেস ও হিউম্যানয়েড রোবোটের ডিজাইন/ব্যালেন্সিং/মিনিমাম এনার্জি নিয়ে বেশি কাজ হয়। UGV/UAV তে ট্র্যাকিং/ সেন্সর নিয়ে বেশি কাজ হয়। মেডিক্যাল রোবোট ও বেশ এগিয়ে গেসে। দূর্ঘটনায় হারানো হাত পা এখন প্রতিস্থাপিত হচ্ছে আর্টিফিসিয়াল আর্ম বা লেগ দিয়ে। এখন সার্জারিও রোবোট দিয়ে হচ্ছে।
এছাড়া বিভিন্ন কীট পতঙ্গের অনুকরনে রোবোটের স্ট্রাকচারের সুবিধা/ স্ট্যাবিলিটি এনালাইসিস হয়, পরবর্তীতে ক্ষেত্র অনুযায়ী আইডিয়া গুলো ব্যবহার করা হয়। আর্টিফিসিয়াল ইন্টিলিজেন্স বাড়ানোর জন্য বিভিন্ন সেন্সর ডেভেলপ করা হচ্ছে। এছাড়া ও বিভিন্ন কীটপতংগের নিজেদের মধ্যকার তথ্য আদান প্রদান করার বিভিন্ন পদ্ধতি রোবোট কন্ট্রলে যুক্ত হচ্ছে। নিউরাল নেটওয়ার্কের মত নানাবিধ এলগরিদম প্রতিনিয়ত এতে যুক্ত হচ্ছে। রাগ-দুঃখ এর মত মানবিক গুনাবলি ফুটিয়ে তোলার ও চেষ্টা চলছে।

চিত্রঃ প্রথম সারিতে হিউম্যানয়েড, রোবোআর্ম, দ্বিতীয় সারিতে বায়োমিমিক রোবোট, প্রসথেটিক লেগ, আন্ডার ওয়াটার রোবোট, তৃতীয় সারিতে স্পেস রোবোট, ইন্ড্রাস্ট্রিয়াল রোবোট, চতুর্থ সারিতে পেইন্টিং ও এসেম্বলিং রোবট
রোবোট কোথায় ব্যবহার হয় আর কেনোই বা ব্যবহার হয়
প্রথম রোবোটের প্রয়োজনীয়তা উদ্ভুত হয় ইন্ড্রাস্ট্রিয়াল application থেকে। মানুষের শক্তির লিমিটেশন থেকেই চিন্তা শুরু। মাইক্রোস্কোপিক মোশন, মোশন-রেজোলেশন, মোশন-প্রিসিশন, আ্যকুরেসি, রিপিটিটিভ আ্যকুরেসি, কর্মদক্ষতা , নোংরা বা অতি উচ্চ বা অতি নিম্ন তাপমাত্রার পরিবেশে কাজ করতে সক্ষমতা থেকেই রোবোট তৈরির যাত্রা শুরু।
সুবিধা সমূহ
Robots increase productivity, safety, efficiency, quality, and consistency of products.
Robots can work in hazardous environments.
Robots need no environmental comfort.
Robots can work continuously without experiencing fatigue or problem.
Robots have repeatable precision and accuracy throughout time.
Robots can be much more accurate than human.
Robots can process multiple tasks simultaneously.
Remote maintenance.
কিছু অসুবিধাও আছে…
¨ Robots do not capable to response at emergencies/ uncertainties (unless they are programmed about all possible unknown cases).
¨ Robots, although superior in certain senses, have limited capabilities in Degree of freedom, Dexterity, Sensors, Vision system, real time response.
¨ Robots are expensive, due to Initial cost of equipment, Installation costs, Need for Peripherals, Need for training, Need for programming. (Industrial aspects)
কোথায় রোবোট ব্যবহার হয়
মিলিটারি/সিকিউরিটি(প্রতিরক্ষা), রেস্কিউ(উদ্ধার), আনম্যান্ড গ্রাউন্ড / এয়ার ভেহিক্যাল (মানুষবিহীন গাড়ি ও আকাশযান), অ্যান্ডার ওয়াটার ভেহিকেল(পানির নিচে কর্মপোযোগী যান), স্পেস (মহাশুন্য), ইন্ড্রাস্ট্রি(কারখানা), টেলি অপারেশন(দূর থেকে নিয়ন্ত্রন), মেডিক্যাল সার্জারি এমনকি বর্তমানে উন্নত দেশ গুলোতে বাসা বাড়িতে দৈনন্দিন কাজে সাহায্যে, এন্টারটেইনমেন্টে(বিনোদন) ও রোবোট ব্যবহার হয়।
উন্নত দেশ গুলোতে অনেক ইন্ড্রাস্ট্রি আছে যে গুলো একেবারে মানুষবিহীন। আমরা নিজের অজান্তে এমন অনেক কিছু পন্য ব্যবহার করি যেগুলা হয়তো মানুষের স্পর্শ ছাড়াই তৈরি হয়েছে। রোবোট কি ধরনের কাজ কারখানা গুলোতে করছে তা দেখতে নিচের ভিডিওটি দেখুন।
http://www.youtube.com/watch?v=4TOotC_Q3sU
বাইপড্ হিয়ম্যানয়েড রোবোট আসিমো
http://www.youtube.com/watch?v=ReN2l816L8k
কিছু তথ্যঃ
- ১৯৫৪ সালে প্রথম প্রোগ্রামবল রোবোট তৈরি করেন জর্জ ডেভল
- প্রথম রোবোট-ইন্ড্রাস্ট্রি হল Unimation, ১৯৫৬ সালে ডেভল কয়েকজন ইঞ্জিনিয়ার নিয়ে গঠন করেন।
- কিছু বিখ্যাত ইন্ড্রাস্ট্রিয়াল রোবোট হচ্ছে FANUC R-2000ia: by FANUC
PUMA 560: by Unimation
- SCARA Robot: Selective Compliance Articulated Robot Arm. First manufactured by Hiroshi Makino, a professor at the University of Yamanashi
- PUMA (Programmable Universal Machine for Assembly)
- Karel Capek’s 1921 play, RUR (Rossum’s Universal Robots), in which machines took over the world
এতক্ষনে হয়ত কিছুটা আন্দাজ করা যাবে রোবোট কত ক্ষেত্রে ব্যবহার হচ্ছে।



চিত্রঃ প্রথম সারিতে প্রসথেটিক হ্যান্ড, সার্জিকাল রোবোট ও মোবাইল রোবোট দ্বিতীয় সারিতে স্পেস রোবোট তৃতীয় সারিতে, আন ম্যান্ড ভেহিকেল রোবোট ও ভ্যাকুয়াম ক্লিনার রোবট

এই লেকচারে এইটুকুই থাক। পরবর্তী লেকচার থেকে আমরা কিছুটা থিওরি পড়াশোনায় ঢুকে যাবো। পরের লেকচারটি হবে রোবোট কাইনেম্যাটিক্স (kinematics) এর ওপর।
কোনো প্রশ্ন থাকলে নিচে কমেন্টে সেটা করুন। আমি সাধ্যমত জবাব দেয়ার চেষ্টা করবো। ভালো থাকুন সবাই।
সূত্র
১) http://en.wikipedia.org/wiki/Karel_%C4%8Capek
২)http://en.wikipedia.org/wiki/Asimo
৩)http://en.wikipedia.org/wiki/HUBO

